HPA是针对Pod级别的,但是如果集群的资源不够了,那就需要对节点进行扩容了。Cluster Autoscaler是Kubernetes提供的集群节点弹性伸缩组件,可根据Pod调度状态及资源使用情况对集群的节点进行自动扩容缩容。
CCE的集群节点弹性伸缩请参见创建节点伸缩策略。
Cluster Autoscaler工作原理
Cluster Autoscaler(简称CA)的主要流程包括两部分:
- ScaleUp流程: CA会每隔15s检查一次所有不可调度的Pod,根据用户设置的策略,选择出一个符合要求的节点组进行扩容。
- ScaleDown流程:CA每隔10s会扫描一次所有的Node,如果该Node上所有的Pod Requests少于用户定义的缩容百分比时,CA会模拟将该节点上的Pod是否能迁移到其他节点,如果可以的话,当满足不被需要的时间窗以后,该节点就会被移除。
如上所述,当集群节点处于一段时间空闲状态时(默认10min),会触发集群缩容操作。
当节点存在以下几种状态的pod时,不可缩容:
1. 节点上的pod有设置PodDisruptionBudget,当移除pod不满足对应条件时,节点不会缩容。
2. 节点上的pod设置本地存储时,节点不会缩容。
3. 节点上的pod由于一些限制,如亲和、反亲和或者taints等,无法调度到其他节点,节点不会缩容。
4. 节点上的pod拥有"cluster-autoscaler.kubernetes.io/safe-to-evict": "false"这个annotations时,节点不缩容。
5. 节点上存在kube-system namespace下的Pod(除kube-system daemonset创建的Pod),节点不缩容。
6. 节点上有非controller(deployment/replica set/job/stateful set)创建的Pod,节点不缩容。
Cluster AutoScaler架构
Cluster AutoScaler架构如下图所示,主要由以下几个核心模块组成:
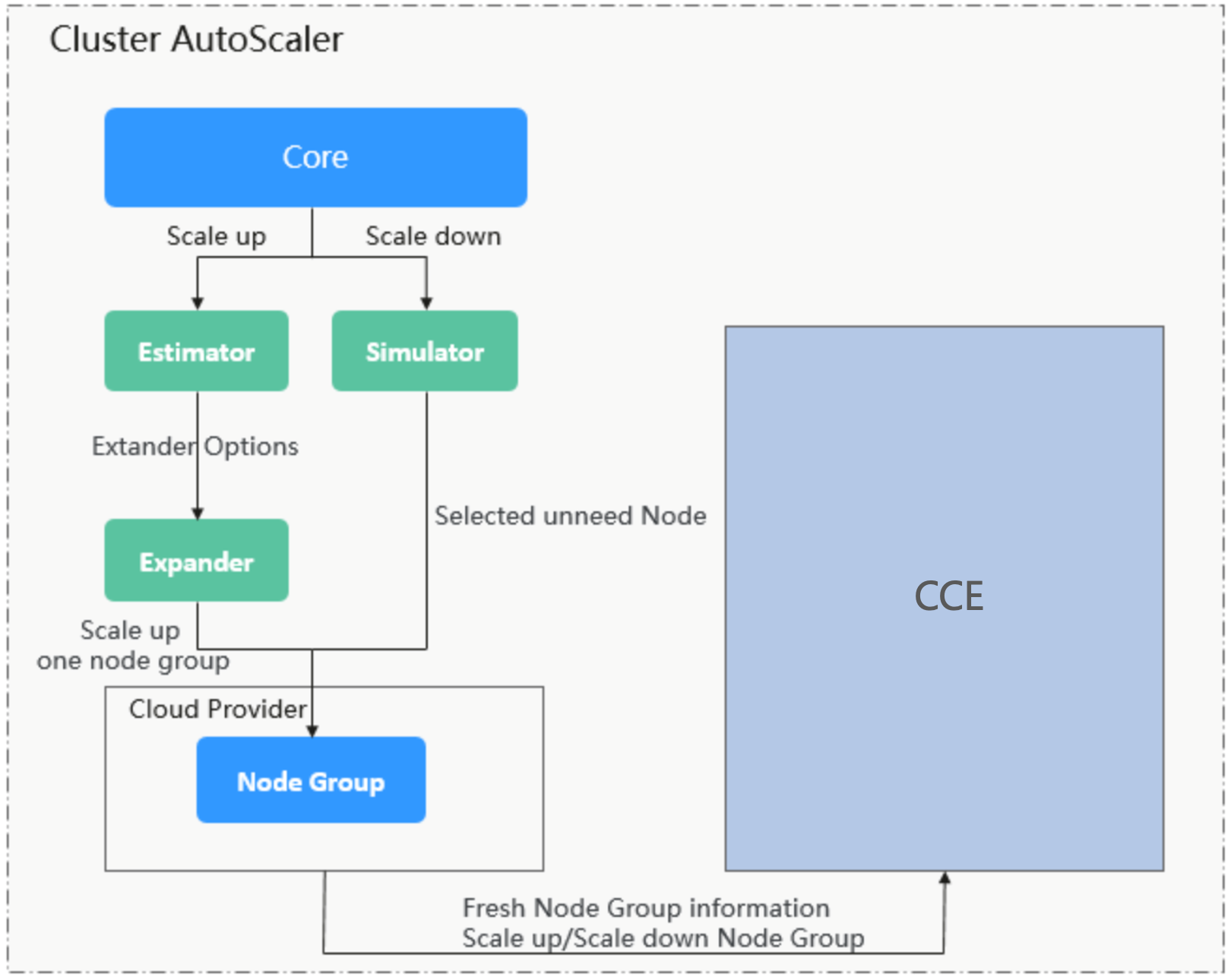
说明如下:
- Estimator: 负责扩容场景下,评估满足当前不可调度Pod时,每个节点池需要扩容的节点数量。
- Simulator: 负责缩容场景下,找到满足缩容条件的节点。
- Expander: 负责在扩容场景下,根据用户设置的不同的策略来,从Estimator选出的节点池中,选出一个最佳的选择。当前Expander有多种策略:
− Random: 随机选择一个节点池,如果用户没有设置的话,默认是Random。
− most-Pods: 选择此次扩容后能满足调度最多Pod的节点池,如果有相同的,再随机选择一个。
− least-waste: 选择此次扩容完成后,具有最小浪费的CPU或者Mem资源的节点池。
− price: 选择此次扩容所需节点金额最小的节点池。
− priority: 根据用户自定义的权重,选择权重最高的节点池。
当前CCE提供除Price以外的所有的策略,当前CCE插件默认使用least-waste策略。

