


在 Kubernetes 项目中,默认调度器的主要职责,就是为一个新创建出来的 Pod,寻找一个最合适的节点(Node)。
而这里“最合适”的含义,包括两层:从集群所有的节点中,根据调度算法挑选出所有可以运行该 Pod 的节点;从第一步的结果中,再根据调度算法挑选一个最符合条件的节点作为最终结果。
默认调度器会首先调用一组叫作 Predicate 的调度算法,来检查每个 Node。然后,再调用一组叫作 Priority 的调度算法,来给上一步得到的结果里的每个 Node 打分。最终的调度结果,就是得分最高的那个 Node。
Kubernetes 的调度器的核心,实际上就是两个相互独立的控制循环。
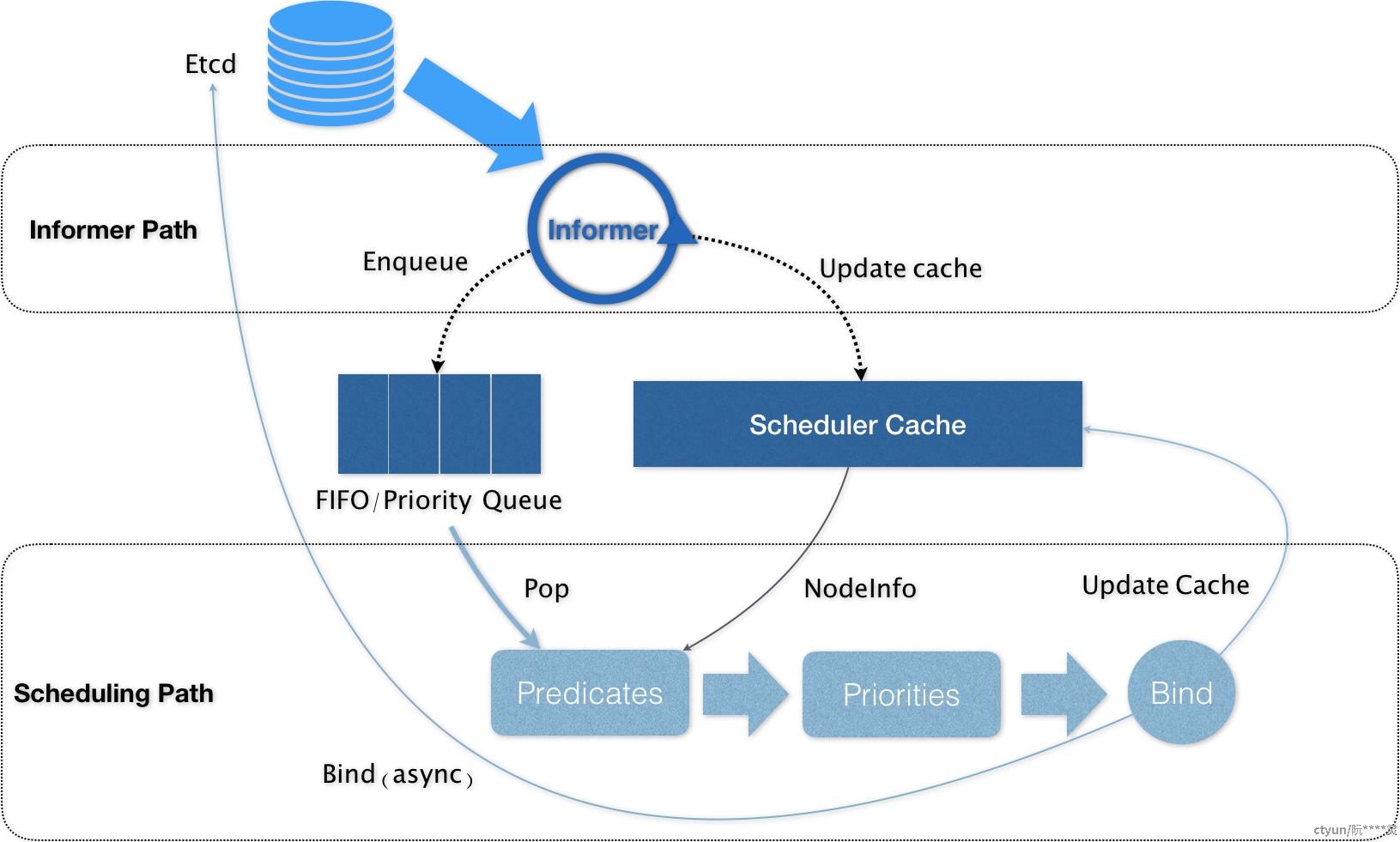
第一个控制循环,我们可以称之为 Informer Path。
它的主要目的,是启动一系列 Informer,用来监听(Watch)Etcd 中 Pod、Node、Service 等与调度相关的 API 对象的变化。比如,当一个待调度 Pod(即:它的 nodeName 字段是空的)被创建出来之后,调度器就会通过 Pod Informer 的 Handler,将这个待调度 Pod 添加进调度队列。
在默认情况下,Kubernetes 的调度队列是一个 PriorityQueue(优先级队列),并且当某些集群信息发生变化的时候,调度器还会对调度队列里的内容进行一些特殊操作。
Kubernetes 的默认调度器还要负责对调度器缓存(即:scheduler cache)进行更新。事实上,Kubernetes 调度部分进行性能优化的一个最根本原则,就是尽最大可能将集群信息 Cache 化,以便从根本上提高 Predicate 和 Priority 调度算法的执行效率。
第二个控制循环,是调度器负责 Pod 调度的主循环,我们可以称之为 Scheduling Path。
Scheduling Path 的主要逻辑,就是不断地从调度队列里出队一个 Pod。然后,调用 Predicates 算法进行“过滤”。这一步“过滤”得到的一组 Node,就是所有可以运行这个 Pod 的宿主机列表。当然,Predicates 算法需要的 Node 信息,都是从 Scheduler Cache 里直接拿到的,这是调度器保证算法执行效率的主要手段之一。
接下来,调度器就会再调用 Priorities 算法为上述列表里的 Node 打分,分数从 0 到 10。得分最高的 Node,就会作为这次调度的结果。调度算法执行完成后,调度器就需要将 Pod 对象的 nodeName 字段的值,修改为上述 Node 的名字。这个步骤在 Kubernetes 里面被称作 Bind。
Kubernetes 的默认调度器在 Bind 阶段,只会更新 Scheduler Cache 里的 Pod 和 Node 的信息。这种基于“乐观”假设的 API 对象更新方式,在 Kubernetes 里被称作 Assume。
Assume 之后,调度器才会创建一个 Goroutine 来异步地向 APIServer 发起更新 Pod 的请求,来真正完成 Bind 操作。如果这次异步的 Bind 过程失败了,其实也没有太大关系,等 Scheduler Cache 同步之后一切就会恢复正常。
上述 Kubernetes 调度器的“乐观”绑定的设计,当一个新的 Pod 完成调度需要在某个节点上运行起来之前,该节点上的 kubelet 还会通过一个叫作 Admit 的操作来再次验证该 Pod 是否确实能够运行在该节点上。这一步 Admit 操作,实际上就是把一组叫作 GeneralPredicates 的、最基本的调度算法,比如:“资源是否可用”“端口是否冲突”等再执行一遍,作为 kubelet 端的二次确认。
