


从整个HDFS系统架构上看,NameNode是其中最重要、最复杂也是最容易出现问题的地方,而且一旦NameNode出现故障,整个Hadoop集群就将处于不可服务的状态,同时随着数据规模和集群规模地持续增长,很多小量级时被隐藏的问题逐渐暴露出来。所以,从更高层次掌握NameNode的内部结构和运行机制尤其重要。
NameNode管理着整个HDFS文件系统的元数据。
HDFS元数据按类型分,主要包括以下几个部分:
- 文件、目录自身的属性信息,例如文件名,目录名,修改信息等。
- 文件记录的信息的存储相关的信息,例如存储块信息,分块情况,副本个数等。
- 记录 HDFS 的 Datanode 的信息,用于 DataNode 的管理。
按形式分为内存元数据和元数据文件两种,分别存在内存和磁盘上。
HDFS元数据文件分为两类,用于持久化存储:
- fsimage 镜像文件:是元数据的一个持久化的检查点,包含 Hadoop 文件系统中的所有目录和文件元数据信息,但不包含文件块位置的信息。文件块位置信息只存储在内存中,是在 datanode 加入集群的时候,namenode 询问 datanode 得到的,并且间断的更新。
- Edits 编辑日志:存放的是 Hadoop 文件系统的所有更改操作(文件创建,删除或修改)的日志,文件系统客户端执行的更改操作首先会被记录到 edits 文件中。
fsimage 和 edits 文件都是经过序列化的,在 NameNode 启动的时候,它会将 fsimage文件中的内容加载到内存中,之后再执行 edits 文件中的各项操作,使得内存中的元数据和实际的同步,存在内存中的元数据支持客户端的读操作,也是最完整的元数据。
当客户端对 HDFS 中的文件进行新增或者修改操作,操作记录首先被记入 edits 日志文件中,当客户端操作成功后,相应的元数据会更新到内存元数据中。因为 fsimage 文件一般都很大(GB 级别的很常见),如果所有的更新操作都往 fsimage 文件中添加,这样会导致系统运行的十分缓慢。
如下图所示,从架构设计上看,元数据大致分成两个层次。
- Namespace管理层:负责管理文件系统中的树状目录结构以及文件与数据块的映射关系;
- 块管理层:负责管理文件系统中文件的物理块与实际存储位置的映射关系BlocksMap。
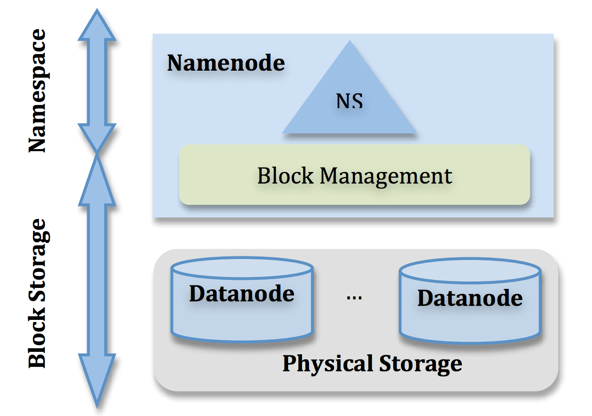
Namespace管理的元数据除内存常驻外,也会周期Flush到持久化设备上FsImage文件;BlocksMap元数据只在内存中存在。
当NameNode发生重启,首先从持久化设备中读取FsImage构建Namespace,之后根据DataNode的汇报信息重新构造BlocksMap。这两部分数据结构是占据了NameNode大部分JVM Heap空间。
除了对文件系统本身元数据的管理之外,NameNode还需要维护整个集群的机架及DataNode的信息、Lease管理以及集中式缓存引入的缓存管理等。这几部分数据结构空间占用相对固定,且占用较小。
测试数据显示,Namespace目录和文件总量到2亿,数据块总量到3亿后,常驻内存使用量超过90GB。
内存全景
如下图所示,NameNode整个内存结构大致可以分成四大部分:Namespace、BlocksMap、NetworkTopology及其它。
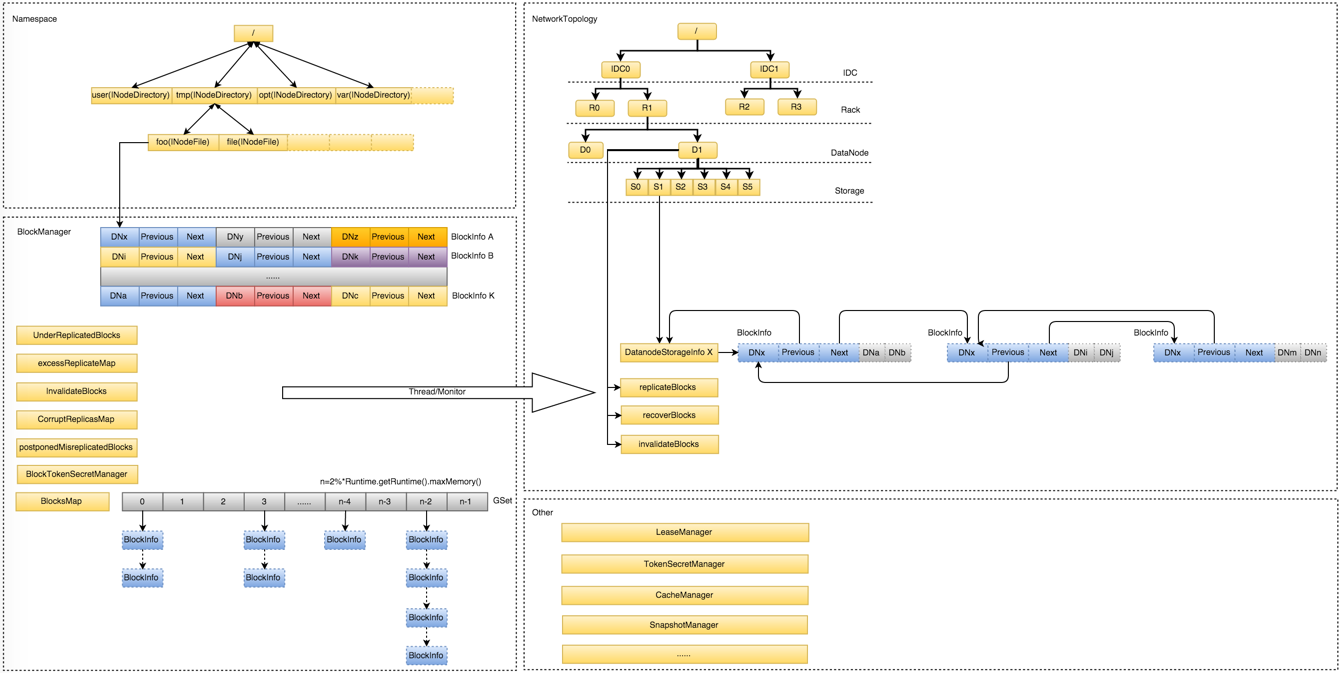
- Namespace:维护整个文件系统的目录树结构及目录树上的状态变化;
- BlockManager:维护整个文件系统中与数据块相关的信息及数据块的状态变化;
- NetworkTopology:维护机架拓扑及DataNode信息,机架感知的基础;
- LeaseManager:读写的互斥同步就是靠Lease实现,支持HDFS的Write-Once-Read-Many的核心数据结构;
- CacheManager:Hadoop 2.3.0引入的集中式缓存新特性,支持集中式缓存的管理,实现memory-locality提升读性能;
- SnapshotManager:Hadoop 2.1.0引入的Snapshot新特性,用于数据备份、回滚,以防止因用户误操作导致集群出现数据问题;
- DelegationTokenSecretManager:管理HDFS的安全访问;
- 另外还有临时数据信息、统计信息metrics等等。
NameNode常驻内存主要被Namespace和BlockManager使用,二者使用占比分别接近50%。其它部分内存开销较小且相对固定,与Namespace和BlockManager相比基本可以忽略。
内存分析
NameSpace
与单机文件系统相似,HDFS对文件系统的目录结构也是按照树状结构维护,Namespace保存了目录树及目录树上每个目录/文件节点的属性,包括名称(name)、编号(id)、所属用户(user)、所属组(group)、权限(permission)、修改时间(mtime)、访问时间(atime)、子目录/文件(children)等信息。除在内存常驻外,这部分数据会定期flush到持久化设备上,生成一个新的FsImage文件,方便NameNode发生重启时,从FsImage及时恢复整个Namespace。
下图所示为Namespace内存结构。前述集群中目录和文件总量即整个Namespace目录树中包含的节点总数,可见Namespace本身其实是一棵非常巨大的树。
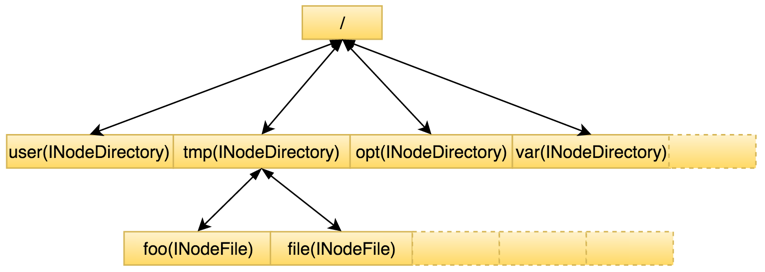
在整个Namespace目录树中存在两种不同类型的INode数据结构:INodeDirectory和INodeFile。其中INodeDirectory标识的是目录树中的目录,INodeFile标识的是目录树中的文件。由于二者均继承自INode,所以具备大部分相同的公共信息INodeWithAdditionalFields,除常用基础属性外,其中还提供了扩展属性features,如Quota、Snapshot等均通过Feature增加,如果以后出现新属性也可通过Feature方便扩展。不同的是,INodeFile特有的标识副本数和数据块大小组合的header(2.6.1之后又新增了标识存储策略ID的信息)及该文件包含的有序Blocks数组;INodeDirectory则特有子节点的列表children。
这里需要特别说明children是默认大小为5的ArrayList,按照子节点name有序存储,虽然在插入时会损失一部分写性能,但是可以方便后续快速二分查找提高读性能,对一般存储系统,读操作比写操作占比要高。
根据前面的分析,假设HDFS目录和文件数分别为1亿,Block总量在1亿情况下,整个Namespace在JVM中内存使用情况:
Total(Directory) = (24 + 96 + 44 + 48) ∗ 100M + 8 ∗ num(total children) Total(Files) = (24 + 96 + 48) ∗ 100M + 8 ∗ num(total blocks) Total = (24 + 96 + 44 + 48) ∗ 100M + 8 ∗ num(total children) + (24 + 96 + 48) ∗ 100M + 8 ∗ num(total blocks) = ~38GB
关于预估方法的几点说明:
- 对目录树结构中所有的Directory均按照默认INodeDirectory.withQuotaFeature结构进行估算,如果集群开启ACL/Snapshotd等特性,需增加这部分内存开销。
- 对目录树结构中所有的File按照INodeFile进行估算。
- 从整个目录树的父子关系上看,num(total children)就是目录节点数和文件节点数之和。
- 部分数据结构中包括了字符串,按照均值长度为8进行预估,实际情况可能会稍大。
Namespace在JVM堆内存空间中常驻,在NameNode的整个生命周期一直在内存存在,同时为保证数据的可靠性,NameNode会定期对其进行Checkpoint,将Namespace物化到外部存储设备。随着数据规模的增加,文件数/目录树也会随之增加,整个Namespace所占用的JVM内存空间也会基本保持线性同步增加。
BlockManager
HDFS将文件按照一定的大小切成多个Block,为了保证数据可靠性,每个Block对应多个副本,存储在不同DataNode上。NameNode除需要维护Block本身的信息外,还需要维护从Block到DataNode列表的对应关系,用于描述每一个Block副本实际存储的物理位置,BlockManager中BlocksMap结构即用于Block到DataNode列表的映射关系。
BlocksMap经过多次优化形成当前结构,最初版本直接使用HashMap解决从Block到BlockInfo的映射。由于在内存使用、碰撞冲突解决和性能等方面存在问题,之后使用重新实现的LightWeightGSet代替HashMap,该数据结构本质上也是利用链表解决碰撞冲突的HashTable,但是在易用性、内存占用和性能等方面表现更好。关于引入LightWeightGSet细节可参考[HDFS-1114]。
与HashMap相比,为了尽可能避免碰撞冲突,BlocksMap在初始化时直接分配整个JVM堆空间的2%作为LightWeightGSet的索引空间,当然2%不是绝对值,如果2%内存空间可承载的索引项超出了Integer.MAX_VALUE/8(注:Object.hashCode()结果是int,对于64位JVM的对象引用占用8Bytes)会将其自动调整到阈值上限。限定JVM堆空间的2%基本上来自经验值,假定对于64位JVM环境,如果提供64GB内存大小,索引项可超过1亿,如果Hash函数适当,基本可以避免碰撞冲突。
BlocksMap的核心功能是通过BlockID快速定位到具体的BlockInfo。BlockInfo继承自Block,除了Block对象中BlockID,numbytes和timestamp信息外,最重要的是该Block物理存储所在的对应DataNode列表信息triplets。
其中LightWeightGSet对应的内存空间全局唯一。尽管经过LightWeightGSet优化内存占用,但是BlocksMap仍然占用了大量JVM内存空间,假设集群中共1亿Block,NameNode可用内存空间固定大小128GB,则BlocksMap占用内存情况:
16 + 24 + 2% ∗ 128GB +( 40 + 128 )∗ 100M = ~20GB
BlocksMap数据在NameNode整个生命周期内常驻内存,随着数据规模的增加,对应Block数会随之增多,BlocksMap所占用的JVM堆内存空间也会基本保持线性同步增加。
BlocksMap在NameNode内存空间占据很大比例,由BlockManager统一管理,相比Namespace,BlockManager管理的这部分数据要复杂的多。Namespace与BlockManager之间通过前面提到的INodeFile有序Blocks数组关联到一起。下图所示BlockManager管理的内存结构。
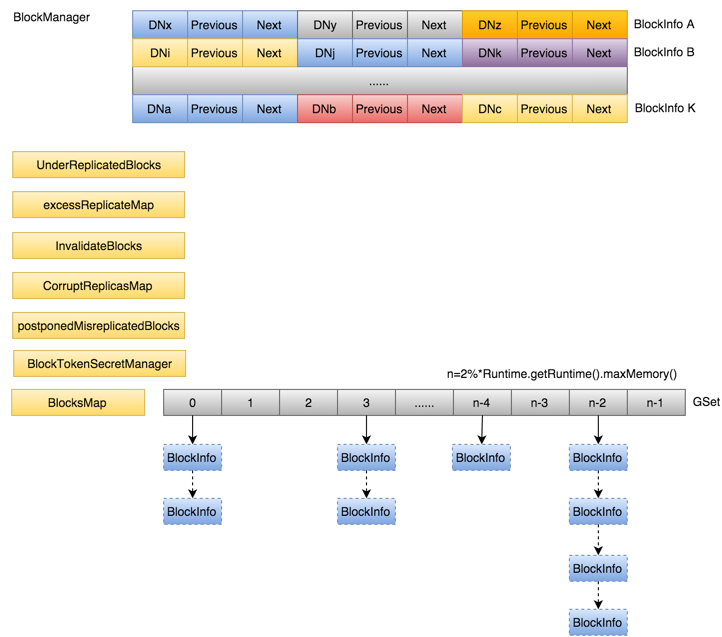
每一个INodeFile都会包含数量不等的Block,具体数量由文件大小及每一个Block大小(默认为64M)比值决定,这些Block按照所在文件的先后顺序组成BlockInfo数组,如图8所示的BlockInfo[A~K],BlockInfo维护的是Block的元数据,数据本身是由DataNode管理,所以BlockInfo需要包含实际数据到底由哪些DataNode管理的信息,这里的核心是名为triplets的Object数组,大小为3*replicas,其中replicas是Block副本数量。
triplets包含的信息:
- triplets[i]:Block所在的DataNode;
- triplets[i+1]:该DataNode上前一个Block;
- triplets[i+2]:该DataNode上后一个Block;
其中i表示的是Block的第i个副本,i取值[0,replicas)。
从前面描述可以看到BlockInfo几块重要信息:
- 文件包含了哪些Block;
- 这些Block分别被实际存储在哪些DataNode上;
- DataNode上所有Block前后链表关系。
如果从信息完整度来看,以上数据足够支持所有关于HDFS文件系统的正常操作,但还存在一个使用场景较多的问题:不能通过blockid快速定位Block,所以引入了BlocksMap。
BlocksMap底层通过LightWeightGSet实现,本质是一个链式解决冲突的哈希表。为了避免rehash过程带来的性能开销,初始化时,索引空间直接给到了整个JVM可用内存的2%,并且不再变化。
集群启动过程,DataNode会进行BR(BlockReport),根据BR的每一个Block计算其HashCode,之后将对应的BlockInfo插入到相应位置逐渐构建起来巨大的BlocksMap。
前面在INodeFile里也提到的BlockInfo集合,如果我们将BlocksMap里的BlockInfo与所有INodeFile里的BlockInfo分别收集起来,可以发现两个集合完全相同,事实上BlocksMap里所有的BlockInfo就是INodeFile中对应BlockInfo的引用;通过Block查找对应BlockInfo时,也是先对Block计算HashCode,根据结果快速定位到对应的BlockInfo信息。
至此涉及到HDFS文件系统本身元数据的问题基本上已经解决了。
前面提到部分都属于静态数据部分,NameNode内存中所有数据都要随读写情况发生变化,BlockManager当然也需要管理这部分动态数据。主要是当Block发生变化不符合预期时需要及时调整Blocks的分布。这里涉及几个核心的数据结构:
- excessReplicateMap:若某个Block实际存储的副本数多于预设副本数,这时候需要删除多余副本,这里多余副本会被置于excessReplicateMap中。excessReplicateMap是从DataNode的StorageID到Block集合的映射集。
- neededReplications:若某个Block实际存储的副本数少于预设副本数,这时候需要补充缺少副本,这里哪些Block缺少多少个副本都统一存在neededReplications里,本质上neededReplications是一个优先级队列,缺少副本数越多的Block之后越会被优先处理。
- invalidateBlocks:若某个Block即将被删除,会被置于invalidateBlocks中。invalidateBlocks是从DataNode的StorageID到Block集合的映射集。如某个文件被客户端执行了删除操作,该文件所属的所有Block会先被置于invalidateBlocks中。
- corruptReplicas:有些场景Block由于时间戳/长度不匹配等等造成Block不可用,会被暂存在corruptReplicas中,之后再做处理。
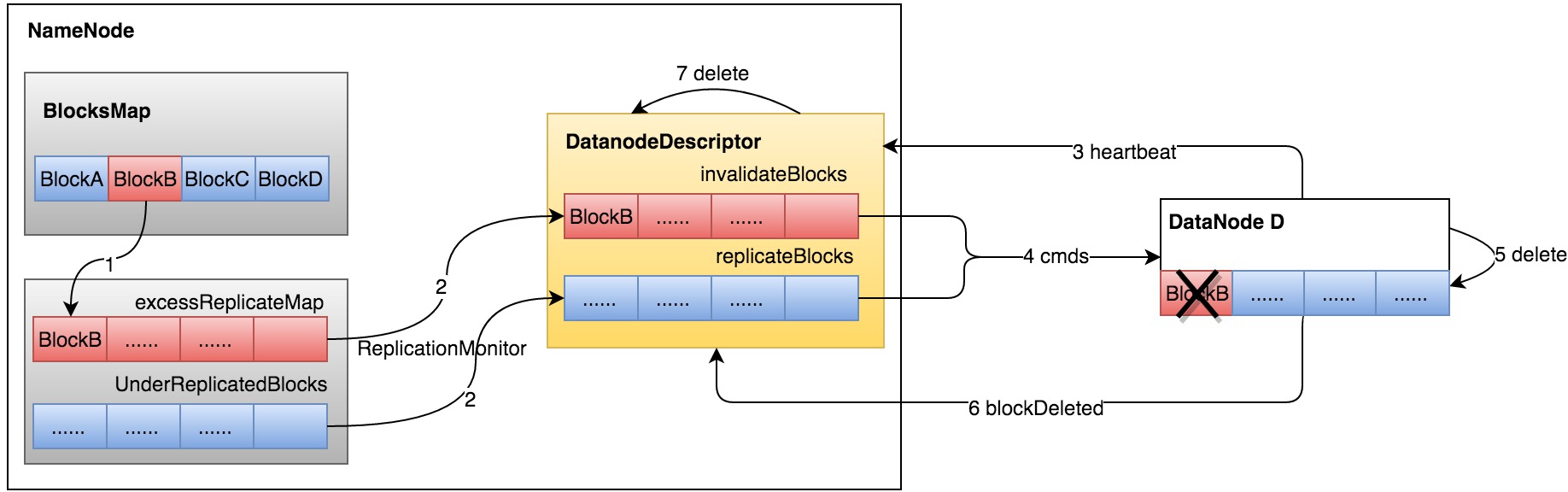
前面几个涉及到Block分布情况动态变化的核心数据结构,这里的数据实际上是过渡性质的,BlockManager内部的ReplicationMonitor线程(图8标识Thread/Monitor)会持续从其中取出数据并通过逻辑处理后分发给具体的DatanodeDescriptor对应数据结构(3.3 NetworkTopology里会有简单介绍),当对应DataNode的心跳过来之后,NameNode会遍历DatanodeDescriptor里暂存的数据,将其转换成对应指令返回给DataNode,DataNode收到任务并执行完成后再反馈回NameNode,之后DatanodeDescriptor里对应信息被清除。
如BlockB预设副本数为3,由于某种原因实际副本变成4(如之前下线的DataNode D重新上线,其中B正好有BlockB的一个副本数据),BlockManager能及时发现副本变化,并将多余的DataNode D上BlockB副本放置到excessReplicateMap中,ReplicationMonitor线程定期检查时发现excessReplicateMap中数据后将其移到DataNode D对应DatanodeDescriptor中invalidateBlocks里,当DataNode D下次心跳过来后,随心跳返回删除Block B的指令,DataNode D收到指令实际删除其上的Block B数据并反馈回NameNode,此后BlockManager将DataNode D上的Block B从内存中清除,至此Block B的副本符合预期,整个流程如下图所示。
NetworkTopology
前面多次提到Block与DataNode之间的关联关系,事实上NameNode确实还需要管理所有DataNode,不仅如此,由于数据写入前需要确定数据块写入位置,NameNode还维护着整个机架拓扑NetworkTopology。下图所示内存中机架拓扑图。
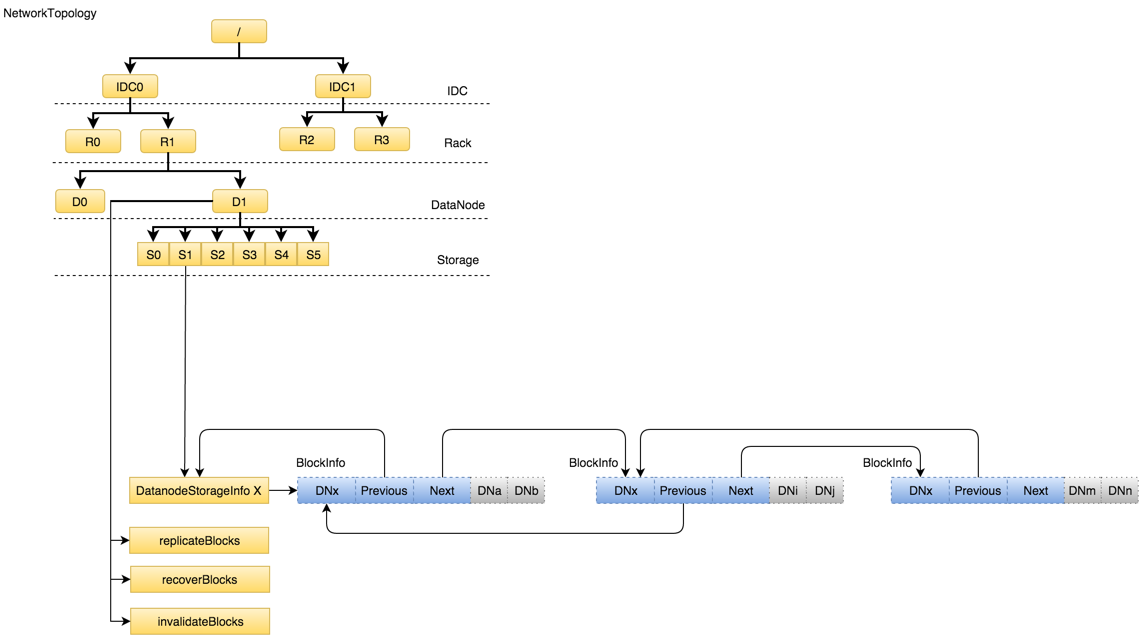
从图8可以看出这里包含两个部分:机架拓扑结构NetworkTopology和DataNode节点信息。其中树状的机架拓扑是根据机架感知(一般都是外部脚本计算得到)在集群启动完成后建立起来,整个机架的拓扑结构在NameNode的生命周期内一般不会发生变化;另一部分是比较关键的DataNode信息,BlockManager已经提到每一个DataNode上的Blocks集合都会形成一个双向链表,更准确的应该是DataNode的每一个存储单元DatanodeStorageInfo上的所有Blocks集合会形成一个双向链表,这个链表的入口就是机架拓扑结构叶子节点即DataNode管理的DatanodeStorageInfo。此外由于上层应用对数据的增删查随时发生变化,随之DatanodeStorageInfo上的Blocks也会动态变化,所以NetworkTopology上的DataNode对象还会管理这些动态变化的数据结构,如replicateBlocks/recoverBlocks/invalidateBlocks,这些数据结构正好和BlockManager管理的动态数据结构对应,实现了数据的动态变化由BlockManager传达到DataNode内存对象最后通过指令下达到物理DataNode实际执行的流动过程,流程在3.2 BlockManager已经介绍。
这里存在一个问题,为什么DatanodeStorageInfo下所有Block之间会以双向链表组织,而不是其它数据结构?如果结合实际场景就不难发现,对每一个DatanodeStorageInfo下Block的操作集中在快速增加/删除(Block动态增减变化)及顺序遍历(BlockReport期间),所以双向链表是非常合适的数据结构。
NameNode通过NetworkTopology维护整个集群的树状拓扑结构,当集群启动过程中,通过机架感知(通常都是外部脚本计算)逐渐建立起整个集群的机架拓扑结构,一般在NameNode的生命周期内不会发生大变化。拓扑结构的叶子节点DatanodeDescriptor是标识DataNode的关键结构。
根据前面的分析,假设集群中包括2000个DataNode节点,NameNode维护这部分信息需要占用的内存总量:
(64 + 114 + 56 + 109 ∗ 16)∗ 2000 = ~4MB
在树状机架拓扑结构中,除了叶子节点DatanodeDescriptor外,还包括内部节点InnerNode描述集群拓扑结构中机架信息。
对于这部分描述机架信息等节点信息,假设集群包括80个机架和2000个DataNode节点,NameNode维护拓扑结构中内部节点信息需要占用的内存总量:
(44 + 48) ∗ 80 + 8 ∗ 2000 = ~25KB
从上面的分析可以看到,为维护集群的拓扑结构NetworkTopology,当集群规模为2000时,需要的内存空间不超过5MB,按照接近线性增长趋势,即使集群规模接近10000,这部分内存空间~25MB,相比整个NameNode JVM的内存开销微乎其微。
LeaseManager
Lease 机制是重要的分布式协议,广泛应用于各种实际的分布式系统中。HDFS支持Write-Once-Read-Many,对文件写操作的互斥同步靠Lease实现。
Lease实际上是时间约束锁,其主要特点是排他性。客户端写文件时需要先申请一个Lease,一旦有客户端持有了某个文件的Lease,其它客户端就不可能再申请到该文件的Lease,这就保证了同一时刻对一个文件的写操作只能发生在一个客户端。
NameNode的LeaseManager是Lease机制的核心,维护了文件与Lease、客户端与Lease的对应关系,这类信息会随写数据的变化实时发生对应改变。
下图所示为LeaseManager内存结构,包括以下三个主要核心数据结构:
- sortedLeases:Lease集合,按照时间先后有序组织,便于检查Lease是否超时;
- leases:客户端到Lease的映射关系;
- sortedLeasesByPath:文件路径到Lease的映射关系。
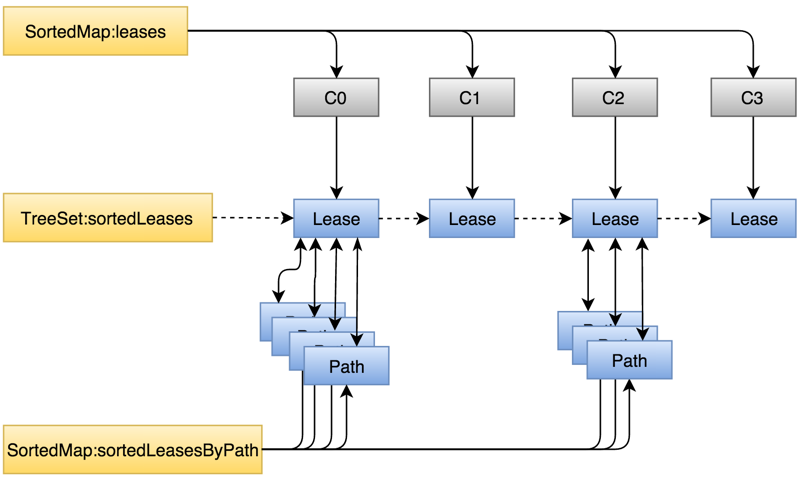
其中每一个写数据的客户端会对应一个Lease,每个Lease里包含至少一个标识文件路径的Path。Lease本身已经维护了其持有者(客户端)及该Lease正在操作的文件路径集合,之所以增加了leases和sortedLeasesByPath为提高通过Lease持有者或文件路径快速索引到Lease的性能。
由于Lease本身的时间约束特性,当Lease发生超时后需要强制回收,内存中与该Lease相关的内容要被及时清除。超时检查及超时后的处理逻辑由LeaseManager.Monitor统一执行。LeaseManager中维护了两个与Lease相关的超时时间:软超时(softLimit)和硬超时(hardLimit),使用场景稍有不同。
正常情况下,客户端向集群写文件前需要向NameNode的LeaseManager申请Lease;写文件过程中定期更新Lease时间,以防Lease过期,周期与softLimit相关;写完数据后申请释放Lease。
整个过程可能发生两类问题:
- 写文件过程中客户端没有及时更新Lease时间;
- 写完文件后没有成功释放Lease。
两个问题分别对应为softLimit和hardLimit。两种场景都会触发LeaseManager对Lease超时强制回收。如果客户端写文件过程中没有及时更新Lease超过softLimit时间后,另一客户端尝试对同一文件进行写操作时触发Lease软超时强制回收;如果客户端写文件完成但是没有成功释放Lease,则会由LeaseManager的后台线程LeaseManager.Monitor检查是否硬超时后统一触发超时回收。
不管是softLimit还是hardLimit超时触发的强制Lease回收,处理逻辑都一样:FSNamesystem.internalReleaseLease,逻辑本身比较复杂,这里不再展开,简单的说先对Lease过期前最后一次写入的Block进行检查和修复,之后释放超时持有的Lease,保证后面其它客户端的写入能够正常申请到该文件的Lease。
NameNode内存数据结构非常丰富,这里对几个重要的数据结构进行了简单的描述,除了前面罗列之外,其实还有如SnapShotManager/CacheManager等,由于其内存占用有限且有一些特性还尚未稳定,这里不再展开。
