


前言
本文旨在介绍一种支持并发读写的无锁哈希表结构。其核心思想来源于两篇论文:
- Michael, M. M. High performance dynamic lock-free hash tables and list-based sets. In Proceedings of the fourteenth annual ACM
symposium on parallel algorithms and architectures, ACM Press, (2002), 73-82. - Ori Shalev and Nir Shavit. Split-ordered lists: Lock-free extensible hash tables. J. ACM 53, 3 (May 2006), 379-405.
其中,第一篇论文重点介绍了无锁单链表的实现原理。有了这篇论文,已经可以实现无锁哈希表了(将冲突链替换为论文中表述的无锁单链表)。第
二篇论文更进一步,提出“分裂排序表”的概念,实现了无锁哈希表的动态扩容。基于第二篇论文的分裂排序表已经在URCU库中实现,参考:https://github.com/urcu/userspace-rcu。
声明:本文仅仅是对上述两篇论文以及URCU库代码进行翻译整理,帮助读者理解无锁哈希表基本原理。论文中介绍的算法,以及URCU库中的代码实现,版权归原作者所有。
哈希表的并发问题
众所周知,哈希表的结构大致如下:
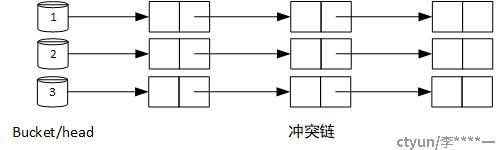
要实现无锁的哈希表(即允许多线程并发地添删改查,却不用加锁),需要解决两个问题:
- 如何实现冲突链的并发访问
- 如何保证元素释放时不被其他线程访问
业界的常规实现方式有两种:
- 变多线程访问为单线程访问
说白了就是分Core分表,即每个线程独享自己的哈希表。使用特殊设计的哈希算法,让命中这个线程的流量仅仅被哈希到同一个线程上。
这确实解决了哈希表的并发访问问题,但是却引入了很多限制:一旦流量处理过程中出现NAT或NAPT(地址换换,端口地址转换),则对称哈希算法则会失效。 - 在桶上加互斥锁或者读写锁。这会严重影响性能。而且写饥饿也不好处理。
这里举一个多线程添加元素的例子,说明并发访问场景下,链表是如何被破坏的。这里假定指针的赋值是原子的(实际上不原子,但是可以以原子方式使用,另外乱序执行问题也不在这里讨论)
我们首先看一下,如果不加锁地访问哈希表,会造成什么后果。为了简化描述,我们定义线程A为当前线程,而线程B做为“干扰者”。然后按照主线程A的操作分类描述。我们定义单链表被操作之前的样子如下:

正常场景(单线程)
单线程在单链表中增加一个元素,操作仅需要两步。这里假定我们想在N1和N2之间插入新元素New,其步骤如下:
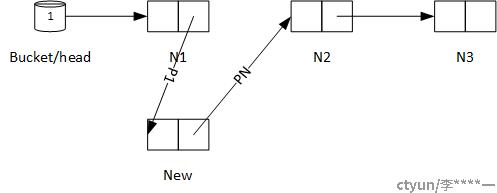
第一步,申请一个新节点,让其后继指针指向N2。
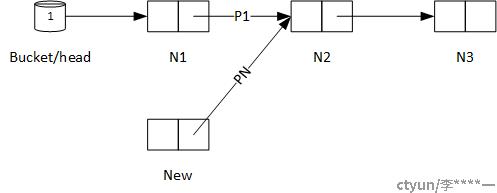
第二步,将N1的后继指针P1指向新加入的元素NEW即可。
当然,这是没有其他线程干扰的情况。我们看下其他线程是如何干扰线程A的。
干扰场景(多线程)
考虑到当线程A执行到第一步和第二步之间的时候,有另外一个线程B也想在同一位置插入节点NEW‘,则会出现以下情况:
1、两个线程同时申请了内存,同时将新节点的后继指针指向N2.
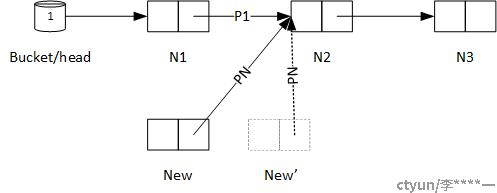
2、然后进程B先修改P1指针,进程A后修改P1指针,则线程B的修改被覆盖,最终的链表将会是下面这个样子:
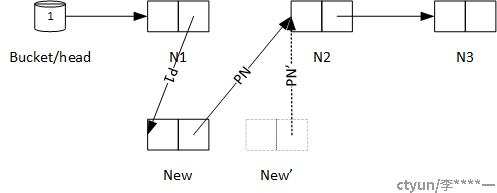
显然,元素New'丢失了。链表同样被破坏的场景,还有在线程A运行时,N1被删除的情况,会酿成更为严重的后果。
无锁链表的实现原理
无锁链表的实现思路,还是CAS操作。 如果某次操作和预期结果不一样,则会放弃当前操作,然后再次尝试。
数据结构
我们先定义一组相关的数据结构:
| // types and structures structure NodeType { /* Node */ Key : KeyType; /* typeval */ <Mark,Next,Tag> : <boolean,*NodeType,TagType>; /* CASMarkNode“”nexttagABA */ } structure MarkPtrType { /* Markkey */ <Mark,Next,Tag> : <boolean,*NodeType,TagType>; /* NodeType */ } // T is the hash array // M is the number of hash buckets T[M] : MarkPtrType; // Initially <0,null,dontcare> /* M */ |
还是要说一下<Mark,Next,Tag>的内存分布:所有这三个字段都是放在两个字中的,两个字需要小于等于机器字长,以便于可以一次访问。这是CAS操作必须的。Next指针在主流机器上是按照单字对齐的(而且它的最后一个bit总是0,可以拿出来使用)。而mark正好使用了这个bit。Tag可以单占一个字。所有以上三个元素可以占用两个相邻字。
哈希表操作函数
哈希表的操作函数定义如下:
| // Hash function h(key:KeyType):0..M-1 { ... } /* 0 M-1 */ // Hash table operations HashInsert(key:KeyType):boolean { /* */ // Assuming new node allocations always succeed nodeAllocateNode(); /* node */ nodeˆ.Keykey; /* keynodekey^.*/ if Insert(&T[h(key)],node) return true; /* T[h(key)]nodetruenodefalse */ FreeNode(node); return false; } HashDelete(key:KeyType):boolean { /* keyT[h(key)]node */ return Delete(&T[h(key)],key); } HashSearch(key:KeyType):boolean { /* keyT[h(key)] */ return Search(&T[h(key)],key); } |
可见,哈希表的操作,是严重依赖单链表的操作的。如果链表的操作是无锁的,那么,哈希表的操作也可以是无锁的(除了哈希比表的总台扩缩容,这个后面讨论)。下面介绍链表的操作。
链表操作函数
私有变量定义
先定义一组私有变量。在后续的链表操作中会被用到:
| // private variables prev : *MarkPtrType; /* */ <pmark,cur,ptag> : MarkPtrType; /* marktag */ <cmark,next,ctag> : MarkPtrType; /* marktag */ |
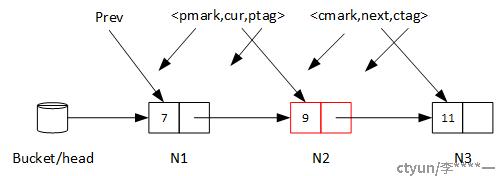
在介绍操作函数之前,有必要介绍一下find函数。后面几乎都用到了。而find函数对上述私有变量的赋值,对理解代码至关重要。
find函数返回一个bool变量,指示匹配key的node是否存在。不管那种情况,当它完成时,它都会对prev, <cur,ptag> and <next,ctag> 进行赋值,这相当于对当前Find操作的一段list元素做了个快照。这个快照包含这样一个node和它的前驱指针:这个node的key刚好大于或者等于输入的key。Find操作保证在某一时刻,当*prev(prev指向的内容)处于链表中时,*prev的内容是<0,cur,ptag>。【译者按:这个就是‘当前节’的上一个节点A,0表示A没有被删除,curr意思是A的next指针指向的就是“当前节点”,ptag当然就是A节点的tag。这里“保证”的意思,是若pmark不是0,它会重复再次执行,直到pmark是0位置。“某一时刻”也就是这个意思。】 并且,如果cur不是NULL,在这个时刻,cur指向的成员curˆ.<Mark,Next,Tag>刚好是<0,next,ctag>【译者按:cur指向的当然是当前节点的下一个节点C了。<0,next,ctag>的意思是,C没有被删除,next是C的next指针,ctag就是C的tag。也就是说,当前节点的下一个节点也不能是已经被删除的节点。】并且cur的key刚好大于或者等于输入key。如果cur等于NULL,则代表list中所有节点的key都比输入的key小。
我们再画图说明一下:
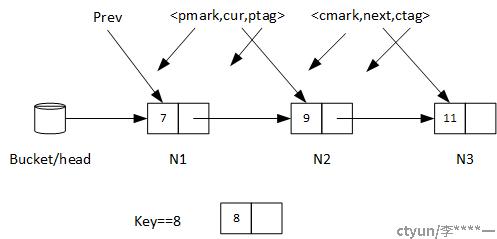
如上图所示。链表中已有元素key分别为7、9、11,待插入节点key为8。则当Find函数返回时,cur应该指向N2,而prev指向N1,next指向N3。并且,pmark只能是0,cmark也只能是0。(不是0就重新执行,直到这两个值是0为止。)
这样,其实是找到了一个“正确的位置”,另外找到了一个“正确的时机”。
插入操作
| Insert(head:*MarkPtrType,node:*NodeType):boolean { /* bool */ keynodeˆ.Key; /* nodekeykey */ while true { A1: if Find(head,key) return false; /* false */ A2: nodeˆ.<Mark,Next> <0,cur>; /* 0cur nodemarknext */ A3: if CAS(prev,0,cur,ptag,0,node,ptag+1) /* CASprevcurnodeCASprevnodepmark0ptagwhile true*/ return true; } } |
画图说明:
我们还是用上面那个图举例。它代表代码运行至A1时的样子。
当代码运行至A2时,这一步实际上是将新增节点的后继指针指向了N2(即cur指向的节点):
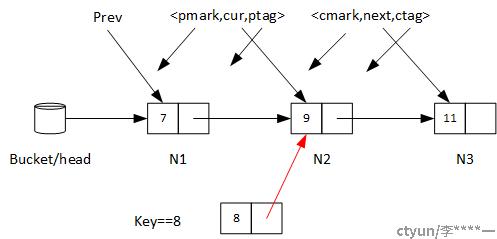
当代码运行至A3时,实际上是将N1的后继指针指向了即将插入的节点。
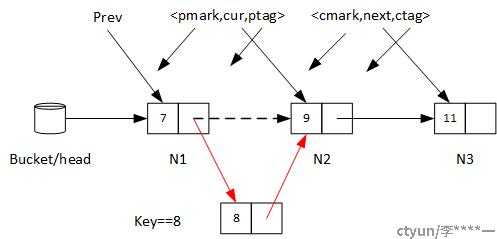
CAS操作CAS(prev,0,cur,ptag,0,node,ptag+1)保证了此时此刻:N1没有被标记为删除,cur指针没有被其他线程修改,而且ptag没有变化(预防ABA问题),这就排除了N1正在被删除、N2正在被删除,或者N2之前正在被插入新元素的情况。所以单链表不会被破坏。
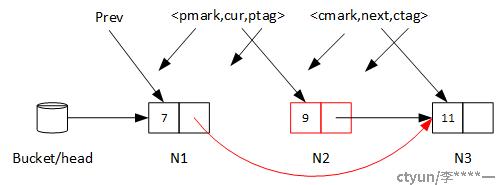
删除操作
| Delete(head:*MarkPtrType,key:KeyType):boolean { while true { B1: if !Find(head,key) return false; /* keyfalse */ B2: if !CAS(&curˆ.<Mark,Next,Tag>, <0,next,ctag>, <1,next,ctag+1>) /* */ continue; B3: if CAS(prev,<0,cur,ptag>,<0,next,ptag+1>) /* prev */ DeleteNode(cur); /* */ else Find(head,key); /* Find */ return true; } } |
画图说明:
当代码运行至B2时,当前节点被标记为“待删除”。
当代码运行至B3时,将prev的后继指针指向cur的后继指针,N2被删除。
在B2时,CAS失败,意味着三个意外情况出现:
- cur指向的元素已经被标记为删除,这个是通过判断cur的mark成员是否为1实现的
- 在cur后面插入和新的节点(这样B3再将N1的后继指针指向N3就不对了),这个是通过判断cur的Next指针是否还指向next来实现的
- N3已经被删除。这时cur的Next指针也不会等于next。(因为一个线程也刚刚运行到B2,此时刚刚经历过Find,cur已经被修改了)
B3失败,意味着:当前线程刚刚运行完B2时,另外一个线程将cur移除了。(那么要么prev指向的当前节点的mark不为0,要么prev的后继指针指向的不是当前节点)
查找操作
| Search(head:*MarkPtrType,key:KeyType):boolean { return Find(head,key); } Find(head:*MarkPtrType;key:KeyType) : boolean { try again: prevhead; /* headprev*/ D1: <pmark,cur,ptag> *prev; /* prev <pmark,cur,ptag> */ while true { D2: if cur=null return false; /* NULL false curNULLprevhead */ D3: <cmark,next,ctag> curˆ.<Mark,Next,Tag>; D4: ckeycurˆ.Key; D5: if *prev != <0,cur,ptag> goto try again; /* *prev */ if !cmark { D6: if ckeykey return ckey=key; /* keykeyckeykey10 */ D7: prev&curˆ.<Mark,Next,Tag>; /* curprev */ } else { D8: if CAS(prev, <0,cur,ptag>,<0,next,ptag+1>) { /* */ DeleteNode(cur); ctagptag+1; } else goto try again; /* */ } D9: <pmark,cur,ptag> <cmark,next,ctag>; /* */ } } |
查找操作不太好用图来说明,这里省略。
总结
综上,通过特殊的设计,实现无锁链表,那么无锁哈希表也就实现了。以上内容均参考自这篇论文:
Michael, M. M. High performance dynamic lock-free hash tables and list-based sets. In Proceedings of the fourteenth annual ACM
symposium on parallel algorithms and architectures, ACM Press, (2002), 73-82.
另外一篇论文,
Ori Shalev and Nir Shavit. Split-ordered lists: Lock-free extensible hash tables. J. ACM 53, 3 (May 2006), 379-405.
在该论文基础上进行了扩展,使得哈希表支持动态扩缩。其基本原理,还是利用了无锁单链表的既有成果:即将所有哈希表中的元素串联成为一个大的单链表。让后将哈希桶也做为这个大链表的元素,从而实现扩缩容时的元素移动(其实是移动哈希桶而不是元素)。大概是下面这个样子:
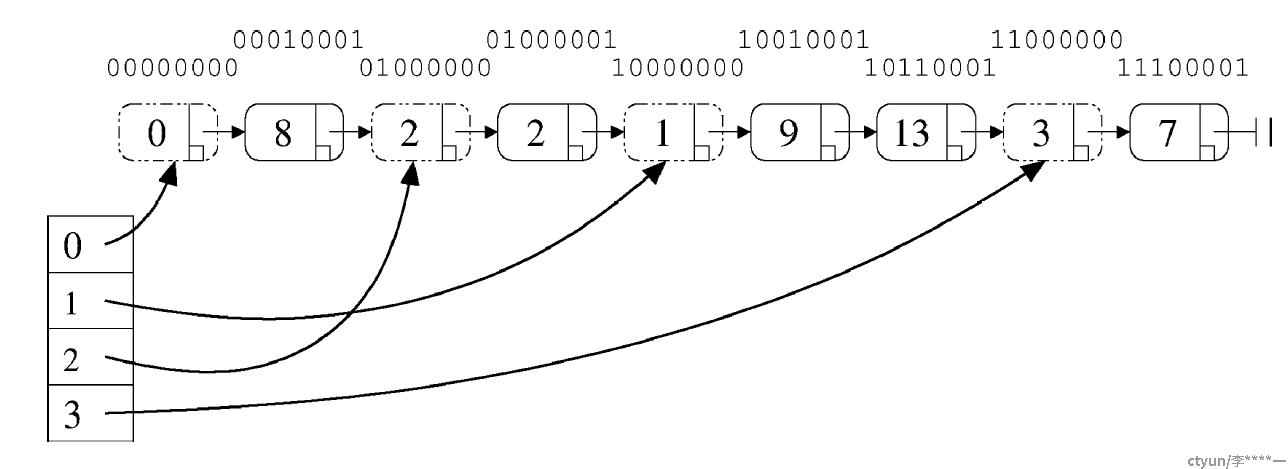
作者将其称之为“分裂排序表”。其原理由读者来验证吧。
